Lab Bonus
Overview
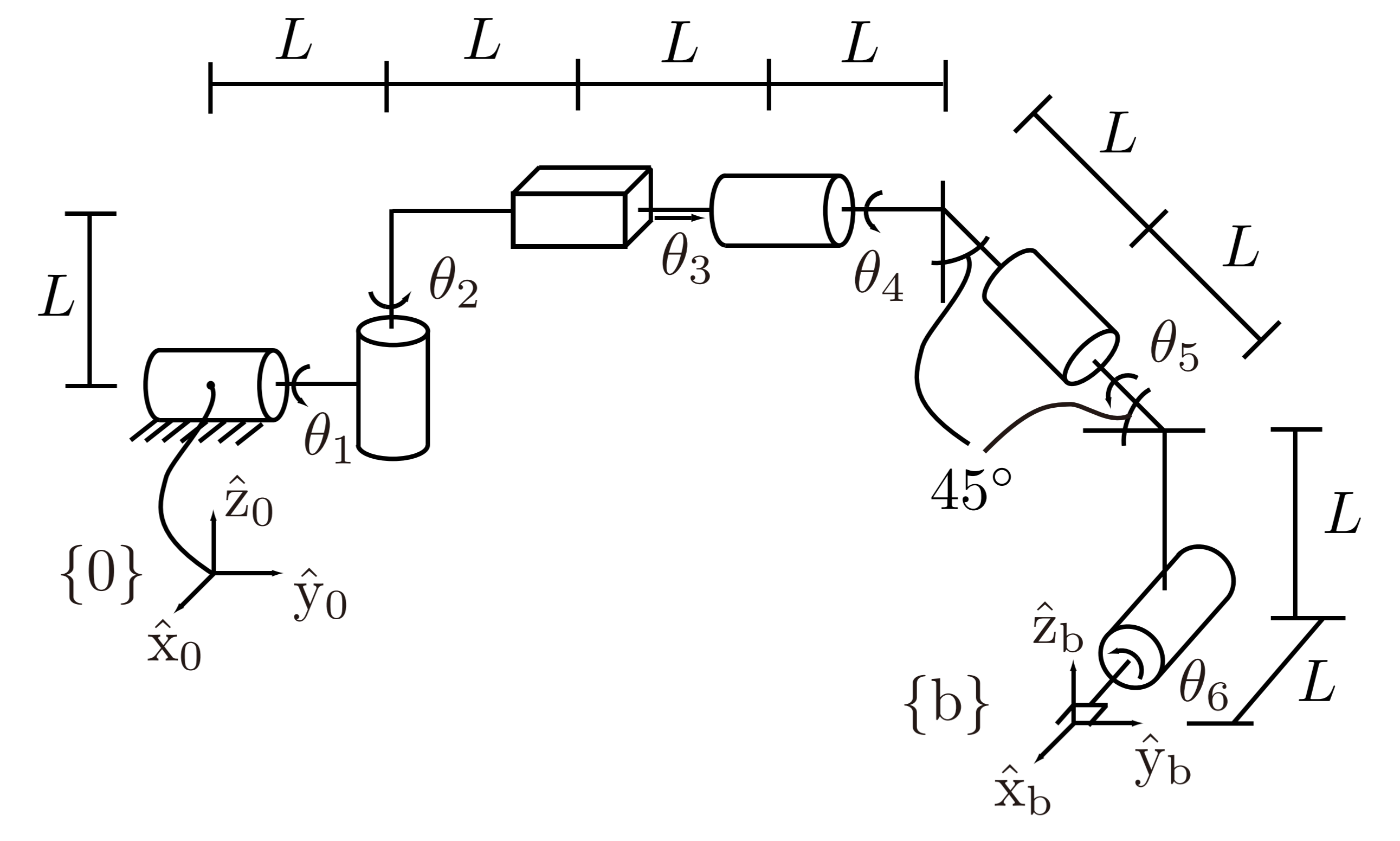
This is a bonus programming assignment following the topic of Forward Kinematics in Lab 4. The score of this assignment (100 bonus points) will be added as a 10% bonus. The problem is to derive and code the forward kinematics of the arm shown in Fig 4.18 in the textbook using the D-H formulation (50 points) and the PoE formula (50 points).
Please follow the instructions as listed below.
Please use exactly the same file name and function name for submission.
Note that this time you need to return the final transformation matrix T, as opposed to position only in Lab 4.
There will be 5 test cases for each approach on autograder. All scripts will be double checked.
It is required to use the PoE and the D-H parameters to solve the problem. In other words, PoE approach must be used in the
forward_kinematics_poe.pyscript, and D-H approach must be used in theforward_kinematics_dh.pyscript. Otherwise penalty will apply and points will be deducted.Since this is a bonus, and to be fair with everyone, there will be no late submission option available, and we will not offer the kind of feedback we gave for Lab 4.
No need to submit the lab report, as this is not a regular lab assignment.
Submission
Submission: individual submission via Gradescope
Due time: 11:59pm, Dec 11, Monday
Files to submit:
forward_kinematics_poe.py
forward_kinematics_dh.py
Grading rubric:
+ 50 pts Product of Exponentials
+ 50 pts D-H Parameters
Sample Code
Two sample Python scripts are provided as follows.
# forward_kinematics_poe.py import numpy as np from math import pi, cos, sin, sqrt import modern_robotics as mr def forward_kinematics_poe(joints, L): # input: length L and joint angles [theta1, theta2, theta3, theta4, theta5, theta6] # output: the final transformation matrix T (from frame {s} to frame {b}) # complete the computation using Product of Exponentials return T
# forward_kinematics_dh.py import numpy as np from math import pi, cos, sin, sqrt def forward_kinematics_dh(joints, L): # input: length L and joint angles [theta1, theta2, theta3, theta4, theta5, theta6] # output: the final transformation matrix T (from frame {s} to frame {b}) # complete the computation using D-H Parameters return T
Specification
Figure 4.18 in the textbook is shown below.